

Update, July 10, 2024
ST and Xvisio Technology will hold a webinar on July 16, 2024, at 11 a.m. PDT / 2 p.m. EDT. John Lin, Founder and CEO of Xvisio Tech and Bharath Rajagopalan, Director of Strategic Marketing at ST, will explore the solutions we address in this blog post, from the ST sensors to SeerLens. Attendees will learn how Xvisio faced its technical challenges and how engineers can create immersive AR experiences with their VSLAM systems. Put simply, it can be a great first step into understanding what makes spatial computing unique and a way to bring the blog post to life by interacting with the actors at the heart of these innovations.
Original publication, May 27, 2024
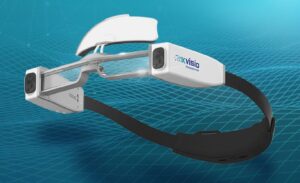
With products like the SeerSense DS80-ST module and the SeerLens One-ST AR glasses, Xvisio Technology shows that spatial computing needs more than a bunch of sensors and algorithms to be genuinely meaningful. That’s why the company chose ST devices to create its visual simultaneous localization and mapping (VSLAM) engine. In essence, VSLAM systems map environments while tracking themselves and interacting with the world. For instance, they’re found in extended reality (XR) headsets, which include virtual reality (VR), augmented reality (AR), and mixed reality (MR). A VSLAM can also assist autonomous vehicles, robots, and more. As the name indicates, the technology relies on visual components like cameras, but there’s more to it than just “seeing” the world.
1. Exceptional Sensors
Why did Xvisio Technology choose ST sensors?

VSLAMs are not new, but they encapsulate the challenges inherent to spatial computing. Engineers must find ways to use numerous and varied sensors to achieve tracking, localization, and mapping functions, all this in the most efficient ways. Unlike the early mainframes that could take entire rooms, spatial computers are on a person’s body or in tight spaces. Consequently, they must contend with stringent power consumption and form factor requirements. That’s why there needs to be a constant back and forth between the sensors employed and the algorithms processing their data. As Xvisio Technology shared,
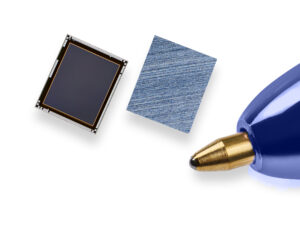
Today, the SeerSense DS80-ST uses the LSM6DSRX inertial sensor and the VD56G3 1.5-megapixel monochrome global shutter image sensor. Similarly, the SeerLens uses the same IMU and the VD55G0, a 0.38-megapixel monochrome global shutter image sensor. Xvisio Technology explains that it settled on those devices because of their performance. For instance, the global shutters had a far better signal-to-noise ratio, and the LSM6DSRX offered far greater stability across a wider temperature range compared to competing solutions. Put simply, spatial computing can only truly transform the technological landscape if integrators choose sensors that offer better performance and unique features. And sensors will continue to play a critical role as they incorporate machine learning cores.
How are ST and Xvisio Technology collaborating?
The importance of sensors in spatial computing explains why ST and Xvisio Technologies have a deep collaboration. Optimizing for SeerSense products means offering drivers and tools that enable more accurate and feature-rich VSLAMs. We also provide our partners with new approaches. For instance, Xvisio Technologies is currently experimenting with ST Time-of-Flight sensors. They chose our component because it has a greater working range than other alternatives on the market. Beyond the specifications, we also work to help reduce power consumption, which is a significant benefit as overheating can cause severe lens distortion. ST can also guarantee performances in harsh industrial environments to fit more applications.
2. Innovative approaches
How did Xvisio Technology optimize its VSLAM?

As Xvisio Technology explained, by taking advantage of ST sensors, their teams could focus on their core expertise: the algorithm and computation engine. Too often, developers underestimate the complexity of a VSLAM system. Most use an indirect or feature-based method. In a nutshell, the computer picks up points from surrounding textures and tracks their position. While it is accurate, it is extremely computationally intensive, which goes against the size and power requirements that drive most VSLAMs. However, by using ST’s global shutters with their optical flow feature, Xvisio Technology can use a more straightforward processing system, which requires less computational power.
The ability to provide a stable and accessible VSLAM product stemmed from decades of research and a mastery of image and IMU sensors. Put simply, Xvisio Technology focuses on optimizing its VSLAM engines so its customers can prioritize the user experience and their core features rather than solve the same challenges. As Xvisio told us, they faced significant challenges, like device selection and validation, as well as design implementation and calibration issues. However, having solved them, they can ensure their customers can work on creating a better spatial computing application instead of having to struggle with those same fundamental trials.