
Today the Drone Zone in our community is live.
We’ve created this community for Drone application enthusiasts, developers, makers, universities, research institutes, and engineers; if you love drones, this is a great place for you!
Here we encourage everybody who joins the community to post their questions and share their experiences using photos, videos and any other Drone-application-related material based on ST devices or evaluation boards. This info and expertise sharing will help you — and others — make progress with your projects.
Do you want to know how to “Build and Fly Your Own Drone with ST’s First Controller Unit?”
Welcome to the Drone Zone: start here!
If you are approaching Drone design for the first time and are looking for a simpler project to start on and customize, you’ll find everything you need already in the Drone Zone:
- FCU STEVAL-FCU001V1 evaluation board:
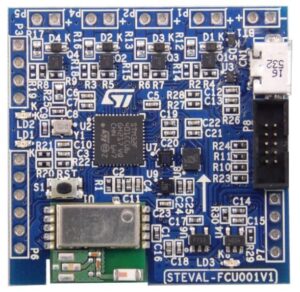
A picture of the STEVAL-FCU001V1. MicroElectroMechanical Systems (MEMS) are at the heart of flight controller units since they track the drone’s movements. The current firmware of the STEVAL-FCU001V1 relies on ST’s 3-axis accelerometer and 3-axis gyroscope LSM6DSL Inertial measurement unit, the same component found in step counters and virtual-reality headsets, among many others. The STEVAL-FCU001V1 also includes the LPS22HD, the best pressure sensor ever put on a drone thanks to its vertical resolution of 8 cm. (3 in.) and its acquisition rate of 200 Hz. The unit also uses the LIS2MDL magnetometer. This design flexibility is also a result of the STM32F401CC microcontroller (MCU) that drives the entire board. The reason ST chose this component was to make developers’ tasks more manageable.
- Open source FW project for STM32 and source code of Android app for BLE remote control:
ST provides the board’s firmware on GitHub and has opened the entire source code to encourage students, engineers, and enthusiasts to modify it and share their ingenuity.
- 30A ESC STEVAL-ESC001V1 evaluation board:
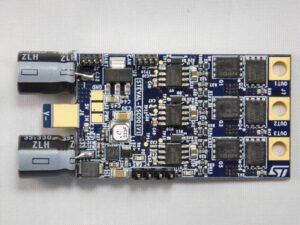
A picture of the STEVAL-ESC001-V1 The STEVAL-ESC001V1 electronic speed controllers (ESC) reference design for drones fits entry-level commercial drone designs and drives any three-phase brushless (or PMSM) motor running off 6S LiPo battery packs, or any equivalent DC supply, up to 30 A peak current.The easy-to-use STEVAL-ESC001V1 gets you spinning a motor and its propeller in minutes thanks to a complete pre-configured firmware package (STSW-ESC001V1) implementing a sensorless Field Oriented Controlled algorithm with 3-shunt current reading, speed control, and full active braking.
- More experienced motor-control-experienced engineers can find a firmware project based on a Vector Control algorithm HERE.